General Tab
 |
| General Tab |
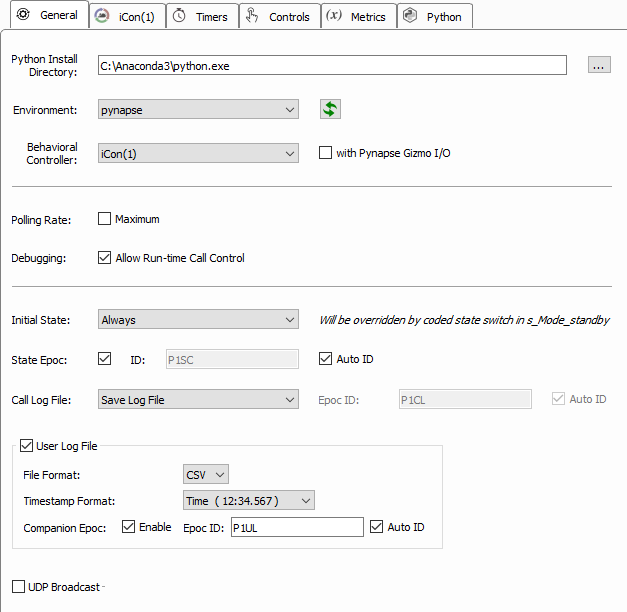
Set the Python Install Directory and Environment for the Python interpreter. See Requirements for information on installing Python and setting up an environment for Pynapse. After these are defined in Pynapse, they will become the default python directory and environment used in future experiments. You can change this in the Preferences Dialog.
iCon Integration
If there is an iCon in your experiment, Pynapse will automatically attach to it and it will be selected in the Behavioral Controller list. This enables the iCon tab and the iCon Inputs and iCon Outputs asset classes in the Python editor and hides the Gizmo Inputs and Gizmo Outputs tabs.
If Behavioral Controller is set to None, the default Gizmo Inputs and Gizmo Outputs tabs and assets are available.
If you want to use a mix of iCon inputs/outputs and gizmo inputs/outputs in your Python code, check the with Pynapse Gizmo I/O box.
Polling Loop
The Pynapse event loop regularly polls the hardware for new information. The polling loop delay depends on the Polling Rate setting. The typical round-trip delays (read Pynapse input → set Pynapse output) are shown below.
For tighter behavioral state control, always enable Maximum Polling Rate.
Note
Maximum polling rate is not available when using Corpus hardware emulation
Debugging
Enable run-time debugging features so you can make manual function calls. See Run-Time and Debugging for more information. Turn this off when the experiment design is finished so you don't accidentally modify the experiment flow during run-time.
States
Initial State tells Pynapse which State to start it when the experiment first executes. If you have Python code in your Always state that triggers a state change when Synapse switches to Standby mode, this will override the state set here. See Synapse Control for more information.
State Epoc saves an epoc event with the timestamp and state number any time the state changes. This is used to correlate your e-phys and other data with behavioral states in post-processing.
Call Log File saves a file called {GIZMO_NAME}_call_log.csv in the block folder that contains
timestamps and state information any time a slot is called. It's essentially a log of every behavioral
event that happens during the recording. You can optionally save a timestamped epoc event in the
data tank as well. 'Off' will disable the Call Log user interface, but the log file is still saved to
disk.
User Log File
Enables automatic logging of Controls, Metrics, and
Session details. Also adds a p_Log asset in Python to write your own entries.
See Logs for more details.
UDP Broadcast
Enables a UDP broadcast packet with session details, so other applications or devices on the
network can interact with the experiment. Also adds a p_Udp asset in Python to write your own
entries. See UDP for more details.